Type: Applied Research
Employer: Rose-Hulman Institute of Technology
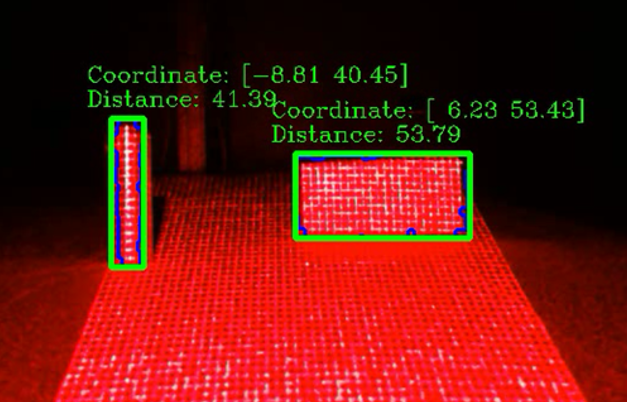
Objective: Object Detection, Tracking, and Analysis
for a 3D Mapping LiDAR
Duration: Jan 2021 - Feb 2021
Trained convolutional neural networks in PyTorch and Tensorflow as the baseline agents to determine the imaged objects' position, velocity, classification, and orientation;
Implemented a neural architecture search system specialized for R-CNN and YOLO using the NeuroEvolution of Augmenting Topologies paradigm;
Integrated the LiDAR interface into the deep learning architecture to allow continuous data collection, preprocessing, and real-time learning.